

Sometimes, there is a perception that a motor can just be connected to any old power supply and it can be regulated by adjusting the voltage. This might be fine for a simple brushed motor, but more advanced units like stepper motors and servo motors need a driver IC to provide the necessary power and torque. In particular, stepper motors are a popular option for applications requiring precision speed control and position control with low hysteresis.
The TMC2130 and TMC2208 are popular options for lightweight applications ranging from medical devices to small robots. While they come from the same manufacturer and have similar specifications, they have different implementations. Here’s how to choose between the TMC2130 vs. the TMC2208 for motor driver and control tasks in your next electromechanical device.
The TMC2130 vs. the TMC2208
Trinamic makes a range of drivers and controller products for motors and electromechanical applications. The TMC2XXX series of stepper motor drivers are meant for smaller motors running at up to 60 V or up to 2A. These simple controllers provide stable output for rotating stepper motors with an integrated gate driver circuit (dual half-bridge topology) and integrated power MOSFETs. There is also an integrated current sense circuit with a precision on each half-bridge arrangement. Finally, an integrated control block takes current sense measurements and implements a proprietary control algorithm to ensure stable power delivery to the motor.
A high-level block diagram showing how these components are implemented is shown below. In this diagram, the TMC2130/TMC2208 driver operates with a bipolar stepper motor and communicates with a host controller over a standard digital interface. Both components can be implemented in this way without an additional motion controller or external gate driver.
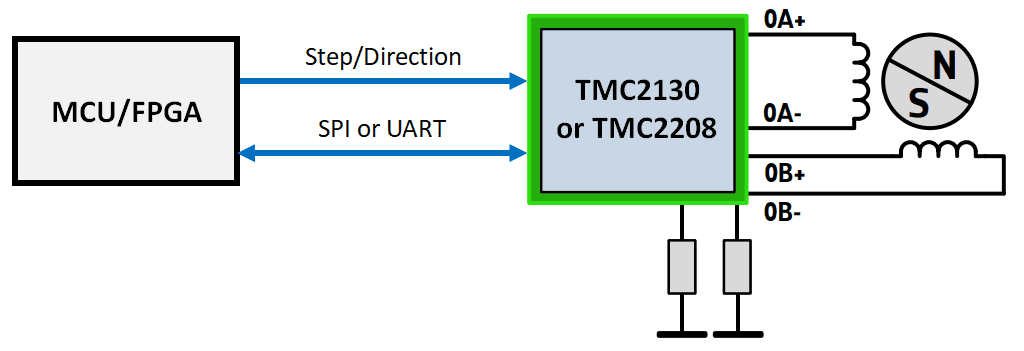

Stepper motor driver application block diagram with the TMC2130 and TMC2208 stepper motor drivers.
The above system layout is typical of digitally-controlled motor drivers operating at moderate voltage and current. Higher power systems (generally greater than ~100 W power output) may use an external half-bridge (bipolar stepper motors) or full-bridge (4-pole stepper motors) gate driver circuit with its own feedback loop, and possibly with external power MOSFETs. Aside from these points about topology and implementation with a host controller, these two components have different specifications and additional implementation modes.
Power and Interfaces
The table below summarizes the important specifications of each component and shows some additional implementation modes supported in the TMC2130 vs. TMC2208 stepper motor driver.
| TMC2130 | TMC2208 | |
| Output voltage | 4.75 to 46 V | 4.75 to 36 V |
| Output current | 2.0 A max (2.5 A peak) | 1.4 A max (2.0 A peak) |
| Communication interface | SPI | UART |
| Motion controller support | Yes | No |
| Parallel bus support | Yes (SPI bus mode, see below) | Yes (via UART bus with switches) |
| Operation modes | Standalone Step/Dir, SPI bus mode | Standalone Step/Dir, Standalone + diagnostics |
The operation modes in each component can be configured externally with the MCU via the controller’s input digital interface (UART for TMC2208 or SPI for TMC2130).
Parallel Motor Bus in the TMC2130 vs. the TMC2208
The SPI bus mode in the TMC2130 is listed as a specific operation mode in the component datasheet. In this mode, a single MCU or FPGA can be used to control multiple TMC2130 motor drivers, each with its own stepper motor. This is implemented on the PCB with a standard SPI bus controlled by the MCU/FPGA. Each controller can be switched on or off via the SPI bus, giving a simple method to implement orchestrated motor control and driving. Most low-cost MCUs can support control algorithms for orchestrated driving of multiple motors, but this requires implementing the TMC4361 for motion control support (see below).
The TMC2208, in contrast, uses a UART bus to implement multiple driver components. This shares the same topology as the SPI bus for multiple TMC2130’s, but the TMC2208 datasheet recommends using analog switches to cut off signals to each TMC2208. A 74HC4066 analog switch or a similar component can be used for this implementation with UART. The advantage here is that such a bus topology does not require an additional TMC4361 motion controller IC for orchestrated motion control.
Motion Controller Support
Finally, the TMC2130 has one advantage over the TMC2208 in that it can be used with a motion controller. In this topology, the motion controller (TMC4361 or TMC429) sits between the MCU/FPGA and the TMC2130 motor driver, as shown in the image below.
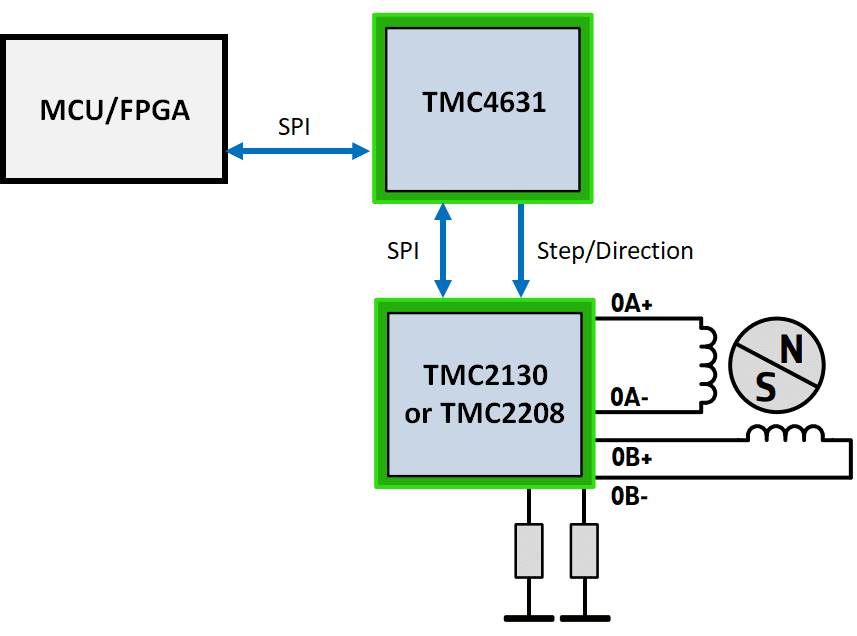

Stepper motor driver with TMC2130 and TMC4631 motion controller.
Here, the TMC4361 is responsible for sending step and direction signals to the TMC2130 and is configured using the MCU/FPGA over SPI. In addition, the SPI and step/direction signals can be implemented over a bus for driving multiple stepper motors in parallel. Be sure to check the TMC2130 datasheet for more details.
Finding the Motor Control Components You Need
Once you’ve chosen between the TMC2130 vs. TMC2208, you’ll need a number of other components for your system. Some of these components include power regulators, passives for filtering and feedback loop implementation, and a controller IC for implementing your motor driver settings. The best electronics search engine services can give you access to the components you need from major suppliers, as well as CAD data for your parts.
The next time you need to find components for your new design, try using the electronics search engine features in Ultra Librarian. When you use Ultra Librarian, you’ll have access to datasheets, technical specifications, CAD data, and verified 3D models that can be imported into popular ECAD applications. You’ll also have access to sourcing information from worldwide distributors.
Working with Ultra Librarian sets up your team for success to ensure any design is going through production and validation with accurate models and footprints to work from. Register today for free.