
In 1986, a new communication protocol for automotives was released by Robert Bosch GmbH—most often referred to as Bosch—at that year’s Society of Automotive Engineers (SAE) conference. By 1991, Mercedes-Benz was using the Controller Area Network (CAN) as the basis for the wiring system in the W140. Today, CAN bus is one of only five protocols used in the OBD-II standard, which is required for all cars and light trucks sold in the US. The European version, EOBD, is mandated for all petroleum and diesel vehicles in the European Union.
In addition to automobiles, CAN bus is used in aircraft, railroad systems, ships, agricultural equipment, medical devices, automated building control systems, elevators, escalators, buildings, and electric bikes. The network enables communication between physical systems such as sensors and actuators. The greatest advantage, however, is the ability to control various hardware digitally or by computer.
Let’s explore this system further and examine a common network component, the MCP2551 CAN transceiver, which has been utilized in many designs.
High-Speed CAN Networks
CAN bus has gone through several revisions over the past few decades, resulting in higher data rates and flexibility. The primary application, however, continues to be automobiles, an example of which is shown in the figure below.
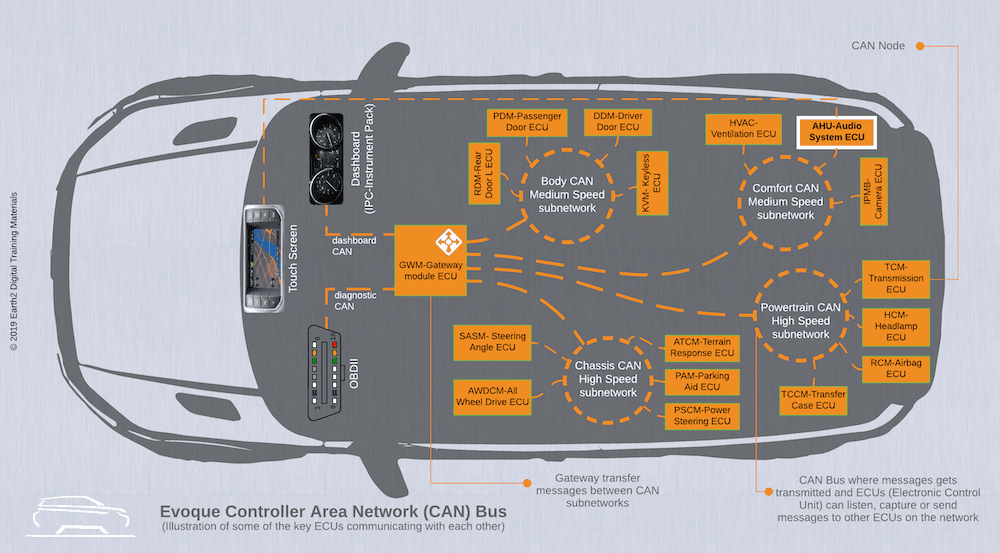
Example of CAN usage in an automotive system1
As shown in the figure above, several CAN subnetworks with differing data transmission rates can be utilized within the same platform. High-speed CAN has a bit speed of 1 Mb/s, while flexible CAN can accommodate a rate of up to 5 Mb/s.
A CAN bus network consists of a controller, processor, the devices being driven or read, and the transceiver. Interfaces are also used for interconnection between multiple CAN bus networks. Of these devices, the transceiver is critical, as it enables communication between the digital processor and the bus which carries a differential signal.
1Image from Earth2 Software at https://www.earth2.digital/blog/what-is-vehicle-can-bus-ecu-evoque-adam-ali.html.
The MCP2551 CAN Transceiver
A popular transceiver is the MCP2551 from Microchip Technology, Inc. Notable features of this component, as given in the MCP2551 CAN transceiver datasheet, are high-speed (1 Mb/s) data rate capability, improved electromagnetic compatibility due to externally controlled slope, robust protection against shorts, overvoltage, brownouts, thermal shutdown, and 112 node connectivity.
This transceiver has three operating modes: 1) standby, 2) slope-control, and 3) high-speed, which are selectable by the connection to Rs, shown in the block diagram below.
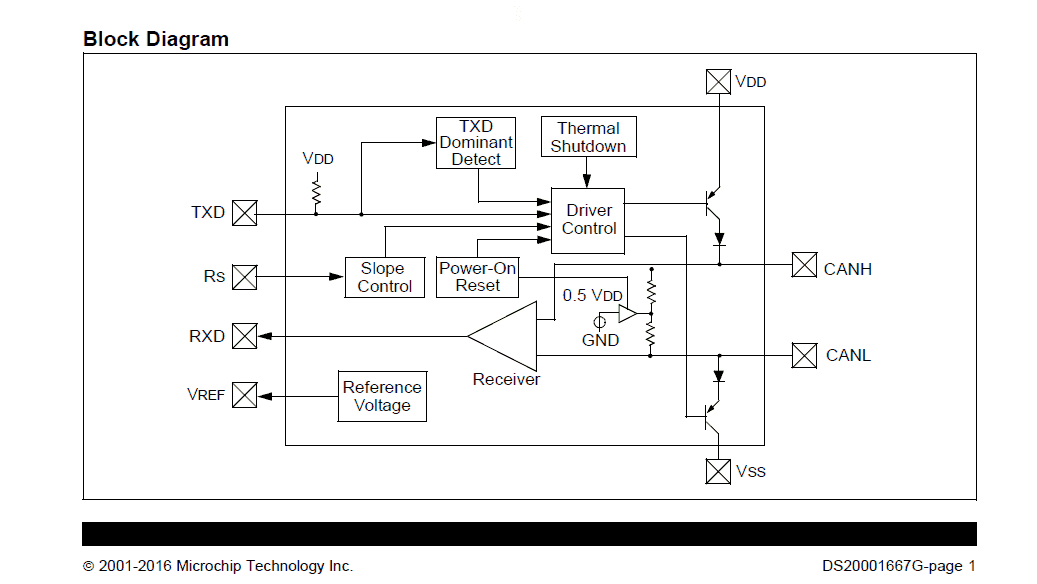
MCP2551 Internal Operations
Slope-control is implemented by connecting an external resistor to Rs. For high-speed operation, Rs should be connected to Vss and to VDD for standby mode. This transceiver also has an operating range of -40 °C to 80 °C, which is substantial for most industrial applications. However, if required, the temperature range can be extended to 125 °C.
Parameters and Specifications
The MCP2551 is designed to be used in both 12V and 24V systems and utilizes a 5V ∓ 0.5V supply. It is also notable that the device is protected against ESD up to 4kV on all pins, except the CANL and CANH output pins that are protected up to 6kV. Additional electrical specifications and parameters are listed below.
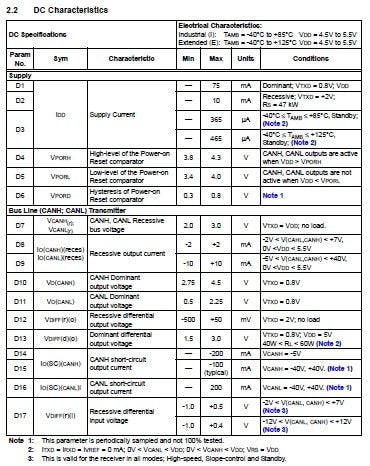
MCP2551 Electrical Characteristics (Part A)
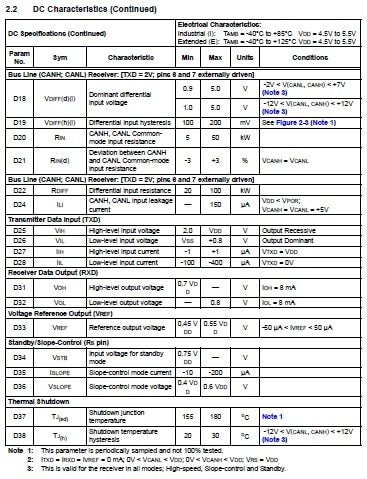
MCP2551 Electrical Characteristics (Part B)
Many of the characteristics listed above are not unique for this type of device. Consequently, there are a few alternatives for the MCP2551 CAN transceiver.
Alternative Components
Although the MCP2551 has a long track record and can be utilized in many applications, the following transceivers are also viable alternatives in most cases.
Other CAN Transceiver Options
Now, let’s take a look at the best way to design boards that incorporate this component.
PCBA Design With the MCP2551
In contrast to some datasheets that give minimal information beyond general functionality, pinout, and perhaps dimensional data to assist in designing a footprint for the component, the MCP2551 datasheet provides performance criteria, timing diagrams, tips for assembly, and is the best source for circuit or schematic design.
Schematic Design
The importance of the MCP2551 CAN transceiver to your CAN bus network design is critical; however, designing a schematic with the device is fairly simple. There are only eight connections, which include two inputs, the output CANL and CANH lines, Vss and VDD, Rs, and TXD—the transmit detect line. Designing the PCBA layout, which must be well-defined to ensure manufacturability, is more complex.
PCBA Layout Design
The MCP2551 CAN transceiver is manufactured in two standard SMT packages—an 8-pin SOIC and 8-pin PDIP. Dimensions for these packages are provided in the datasheet; however, it is far more accurate to rely on CAD drawings, such as the one below, than to manually build the component footprint yourself.
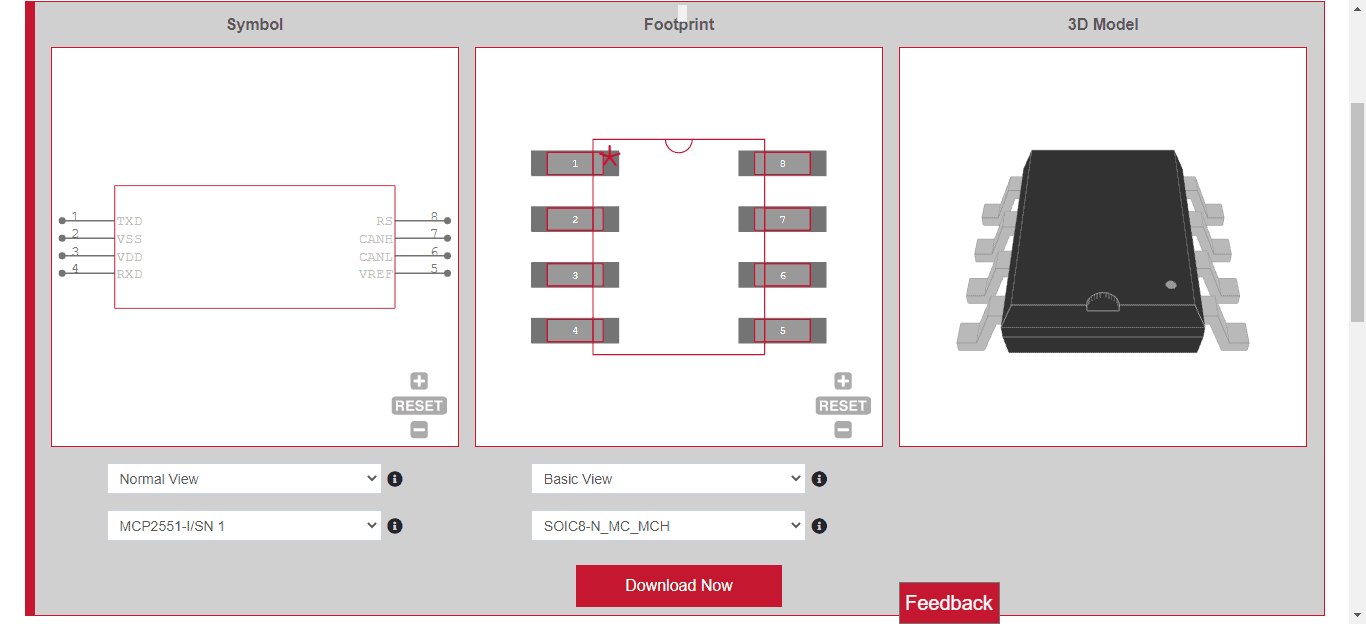
UL CAD images for MCP2551
Regardless of if you use the MCP2551 for your design or you opt to employ one of the device’s alternatives, the best source of CAD data and drawings is to utilize an online component library that sources information from the component manufacturers and the most reliable worldwide distributors to ensure your design will be accurate and in a format that helps facilitate your CM’s board build process.
If you’re looking for CAD models for common components, like the MCP2551 CAN transceiver, Ultra Librarian helps by compiling all your sourcing and CAD information in one place.
Working with Ultra Librarian sets up your team for success to ensure streamlined and error-free design, production, and sourcing. Register today for free.



")


